Diffusion coefficient from a VASP file#
Previously, we looked at obtaining accurate estimates for the mean-squared displacement with kinisi. Here, we show that the same DiffusionAnalyzer can be used to evaluate the diffusion coefficient, using the kinisi methodology.
[ ]:
import numpy as np
import matplotlib.pyplot as plt
import scipp as sc
from pymatgen.io.vasp import Xdatcar
from kinisi.analyze import DiffusionAnalyzer
rng = np.random.RandomState(42)
As wil the previous example, params dictionary will describe the details about the simulation.
[2]:
params = {'specie': 'Li',
'time_step': 2.0 * sc.Unit('fs'),
'step_skip': 50 * sc.Unit('dimensionless'),
'progress': False
}
In this example, we will add an additional key-value pair to the dictionary. This argument means that the diffusion coefficient will only be calculated in the xy plane of the simulation box.
[3]:
params['dimension']= 'xy'
As with the previous example, we now use the from_xdatcar class method to construct the DiffusionAnalyzer object.
[4]:
xd = Xdatcar('./example_XDATCAR.gz')
diff = DiffusionAnalyzer.from_xdatcar(xd, **params)
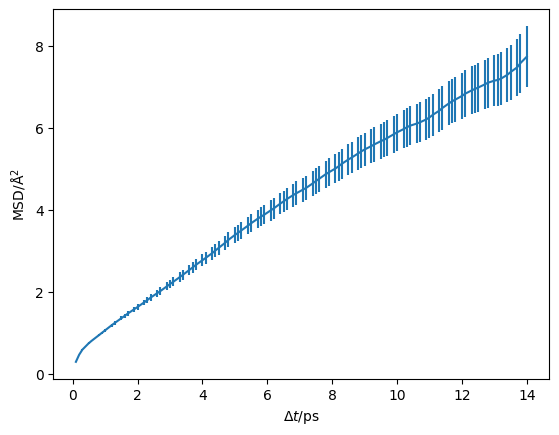
In the above cells, we parse and determine the uncertainty on the mean-squared displacement as a function of the timestep. We should visualise this, to check that we are observing diffusion in our material and to determine the timescale at which this diffusion begins.
[5]:
fig, ax = plt.subplots()
ax.errorbar(diff.dt.values, diff.msd.values, np.sqrt(diff.msd.variances))
ax.set_xlabel(f'Time / {diff.dt.unit}')
ax.set_ylabel(f'MSD / {diff.msd.unit}')
ax.set_xlim(0, None)
ax.set_ylim(0, None)
plt.show()
We can visualise this on a log-log scale, which helps to reveal the diffusive regime (the region where the gradient stops changing).
[6]:
fig, ax = plt.subplots()
ax.errorbar(diff.dt.values, diff.msd.values, np.sqrt(diff.msd.variances))
ax.axvline(3000, color='g')
ax.set_xlabel(f'Time / {diff.dt.unit}')
ax.set_ylabel(f'MSD / {diff.msd.unit}')
ax.set_xscale('log')
ax.set_yscale('log')
plt.show()
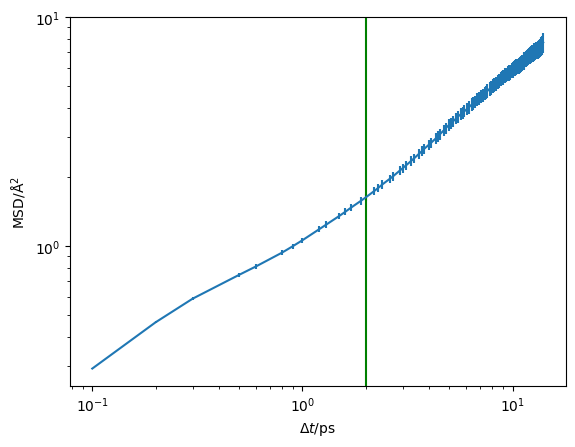
The green line at 3000 fs appears to be a reasonable estimate of the start of the diffusive regime. Therefore, we want to pass 3000 * sc.Units('fs') as the argument to the diffusion analysis below. At this stage, we pass the random_state argument to ensure reproducibility.
[7]:
start_of_diffusion = 3000 * sc.Unit('fs')
diff.diffusion(start_of_diffusion, progress=False, random_state=rng)
This method estimates the correlation matrix between the timesteps and uses posterior sampling to find the self-diffusion coefficient, \(D*\) and intercept. We can find the mean of the marginal posterior samples of \(D*\):
[8]:
diff.D
[8]:
- (samples: 3200)float64cm^2/s(1.24+/-0.11)e-05
Values:
array([1.20904745e-05, 1.13377961e-05, 1.35476525e-05, ..., 1.04137386e-05, 1.08981500e-05, 1.33306816e-05], shape=(3200,))
The same for the intercept can be found from diff.intercept. A histogram of the marginal posterior probability distribution for \(D*\) can be plotted as shown below.
[9]:
fig, ax = plt.subplots()
ax.hist(diff.D.values, density=True)
ax.axvline(sc.mean(diff.D).value, c='k')
ax.set_xlabel(f'D* / [{diff.D.unit}]')
ax.set_ylabel(f'p(D*) / [{(1 / diff.D.unit).unit}]')
plt.show()

It is also possible to plot the posterior distribution of the models on the data. We represent this distribution with 1σ-, 2σ-, and 3σ-credible intervals. Here we remove the measured error bars, in the interest of clarity.
[10]:
credible_intervals = [[16, 84], [2.5, 97.5], [0.15, 99.85]]
alpha = [0.6, 0.4, 0.2]
fig, ax = plt.subplots()
ax.plot(diff.dt.values, diff.msd.values, 'k-')
for i, ci in enumerate(credible_intervals):
ax.fill_between(diff.dt.values,
*np.percentile(diff.distributions, ci, axis=1),
alpha=alpha[i],
color='#0173B2',
lw=0)
ax.set_xlabel(f'Time / {diff.dt.unit}')
ax.set_ylabel(f'MSD / {diff.msd.unit}')
ax.set_xlim(0, None)
ax.set_ylim(0, None)
plt.show()

Finally, the joint posterior probability distribution for the diffusion coefficient and intercept can be visualised with the corner library.
[11]:
from corner import corner
[12]:
corner(np.array([i.values for i in diff.flatchain.values()]).T,
labels=['/'.join([k, str(v.unit)]) for k, v in diff.flatchain.items()])
plt.show()
